
什么是人形机器人的准直驱关节
在人形机器人领域,关节驱动系统的选择直接决定了机器人的运动性能和成本。近年来,准直驱(Quasi-Direct Drive, QDD)关节技术逐渐成为行业关注的焦点。这项技术并非简单的折中方案,而是在深入理解机器人运动需求后的工程化创新。
准直驱关节的本质定义
准直驱关节是一种采用"高扭矩密度无框电机+低传动比减速器"架构的驱动系统。其核心特征是使用传动比小于10:1的行星减速器,区别于传统工业机器人动辄50:1到120:1的高传动比设计。
从力学角度看,准直驱关节的设计理念是让电机承担主要的力矩输出任务,减速器仅提供有限的力矩放大。这种设计使得关节具备接近直驱系统的力控特性,同时保持了减速系统的结构紧凑性。
以CubeMars的AKE80-8产品为例,该执行器采用8:1的行星减速比,实现了52 Nm/kg的扭矩密度和9弧分的背隙精度。这种参数组合在人形机器人应用中提供了力控灵敏度与输出能力的最佳平衡。
技术对比:三种驱动方案的工程权衡
传统刚性驱动器
传统工业机器人普遍采用谐波减速器或RV减速器,传动比通常在50:1到120:1之间。这种设计追求极致的扭矩密度,可达600 Nm/kg以上。特斯拉Optimus早期版本即采用此方案,髋关节使用120:1的谐波减速器,峰值扭矩超过200 Nm。
但高传动比带来的问题同样明显:
- 力控带宽受限于减速器的机械阻尼,典型值仅为200 Hz
- 背隙和摩擦导致低速运动时的非线性响应
- 需要昂贵的力传感器实现闭环力控制,单个传感器成本可达数千元
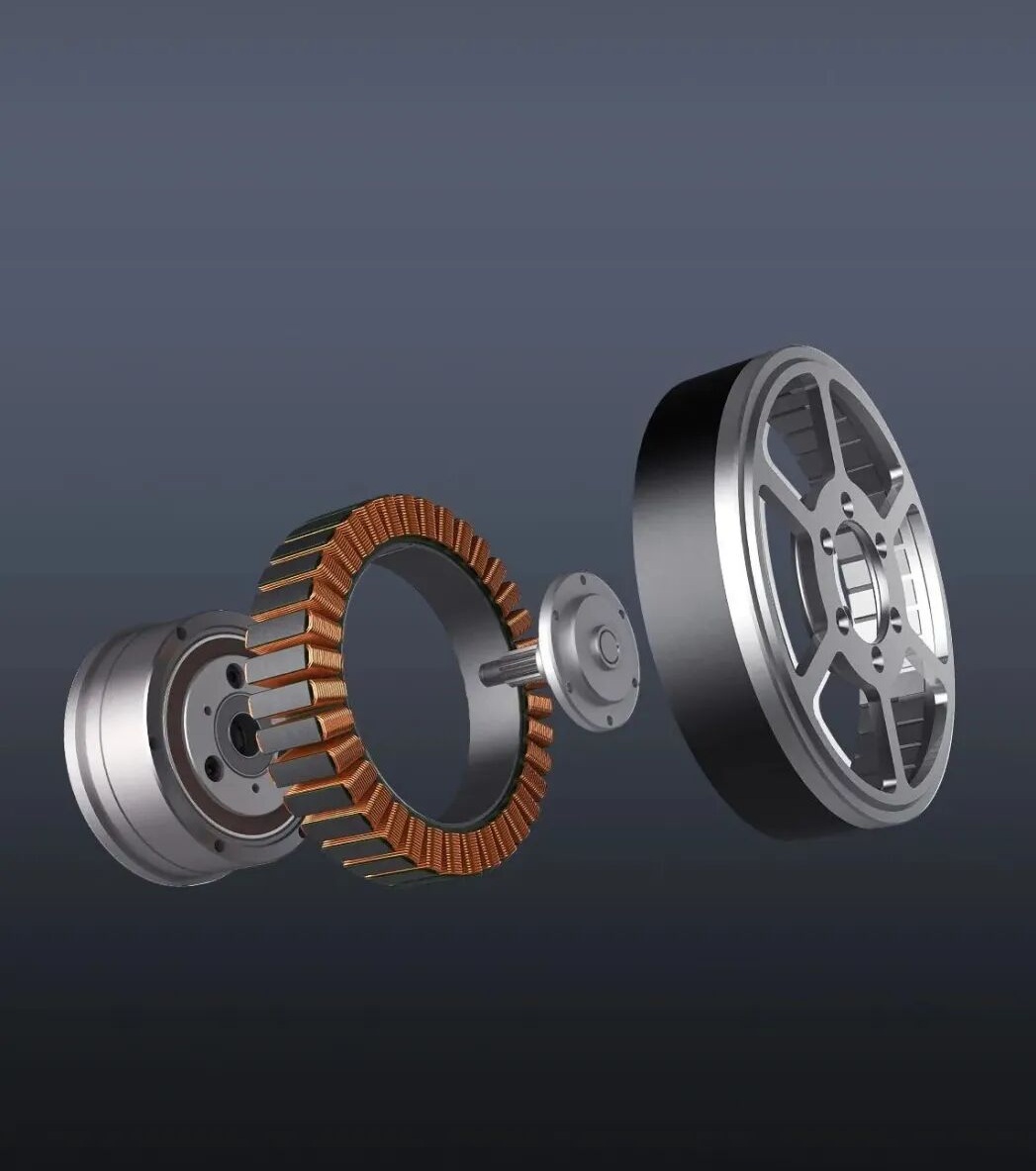
纯直驱方案
直驱系统去除所有减速机构,电机直接驱动负载。这种设计在学术研究中广泛应用,力控带宽可达2 kHz以上,动态响应极佳。
然而纯直驱面临严峻的工程化挑战:
- 为获得足够扭矩,需要大直径外转子电机,导致关节尺寸过大
- 扭矩密度通常仅为150 Nm/kg左右,无法满足人形机器人的动力需求
- 电机成本高昂,产业化难度大
准直驱的技术定位
准直驱关节在两种极端方案之间找到了工程化的最优解:
- 扭矩密度达到300 Nm/kg,是纯直驱的2倍
- 力控带宽1-2 kHz,是传统方案的5-10倍
- 通过电流环实现无传感器力控,成本降低30-50%
这种性能组合恰好契合了人形机器人的应用场景:需要频繁的动态交互,但不要求工业机器人级别的绝对承载能力。
力控原理:准直驱的技术优势
准直驱关节的核心技术优势在于其优秀的力控特性。这种能力源于低传动比带来的"透明度"提升。
机械透明度的物理本质
在传动系统中,输出端感受到的外力需要通过减速器反向传递到电机侧。传动比的平方效应会显著放大摩擦和惯性的影响:
- 反向驱动力矩 = 外力 / 传动比
- 等效摩擦力矩 = 实际摩擦 × 传动比²
对于120:1的谐波减速器,输出端1 Nm的外力只能在电机侧产生约8 mNm的反馈,而摩擦力矩却被放大了14400倍。这导致传统关节难以感知外部环境的力学信息。
准直驱关节的8:1传动比将这种"隔离效应"降低了一个数量级。电机可以更直接地感受到输出端的力学状态,实现高带宽的力控制。
无传感器力控的工程实现
基于良好的机械透明度,准直驱关节可以直接通过电机电流实现力控制。电流与电机扭矩成正比,控制电流即可控制输出力。
这种方案的技术优势包括:
- 控制带宽由电流环决定,可达1-2 kHz
- 无需力传感器,降低成本和机械复杂度
- 避免传感器故障和标定漂移问题
智元远征A1机器人即采用此方案,通过电流环实现全身关节的柔顺控制,在跌倒保护和人机交互中表现出色。
主流厂商的技术方案解析
特斯拉Optimus:从刚性到柔性的演进
特斯拉在Optimus的开发过程中经历了驱动方案的重大调整。早期版本采用传统谐波减速器方案,髋关节扭矩达到200 Nm以上,但在人机交互和柔顺控制方面表现不佳。
最新的Gen 2版本引入了低传动比设计,部分关节的减速比降至20:1以下。配合定制化的力传感器,实现了力控带宽的显著提升。这一转变反映了特斯拉对人形机器人交互特性的深刻理解。
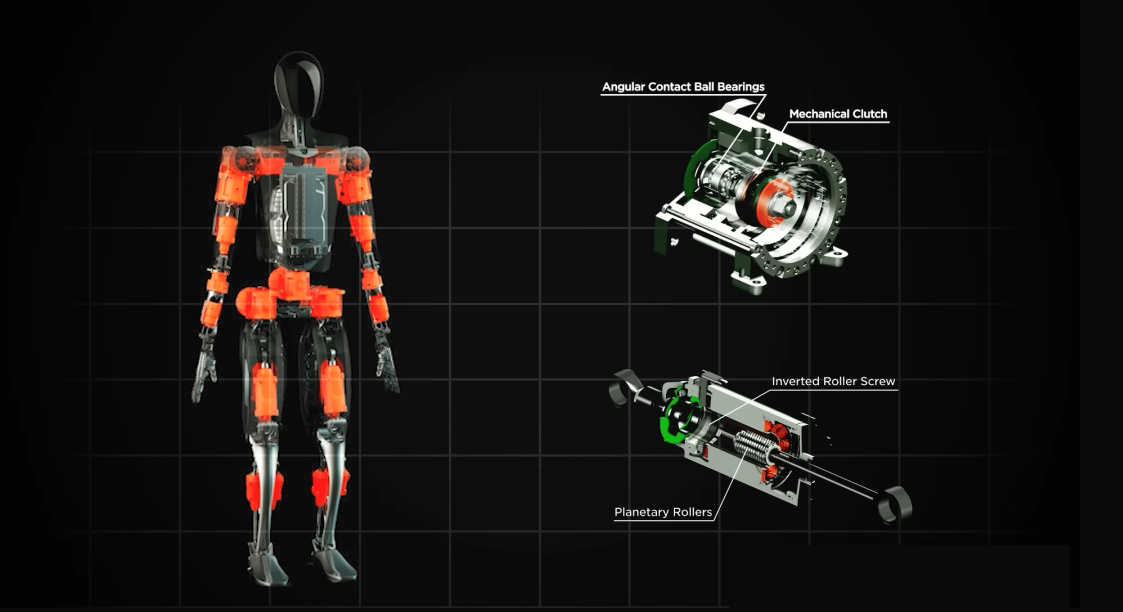
智元远征A1:准直驱的标杆应用
智元机器人的远征A1是国内准直驱技术的代表性产品。其关节执行器采用8:1的行星减速器,配合高扭矩密度的无框电机,实现了52 Nm/kg的扭矩密度。
该方案的技术亮点包括:
- 一体化设计,将电机、减速器、编码器集成在紧凑封装内
- 基于电流环的无传感器力控制,控制周期1 ms
- 优化的热管理设计,持续输出功率达150 W
A1的全身关节均采用统一的准直驱架构,这种标准化设计大幅降低了研发和制造成本。
傅利叶GR-1:医疗级精度的工程实践
傅利叶智能的GR-1人形机器人定位于康复医疗场景,对关节精度和柔顺性要求极高。其准直驱关节采用6:1到10:1的变传动比设计,根据关节位置和负载需求优化性能。
技术特点包括:
- 峰值扭矩230 Nm,持续扭矩120 Nm
- 位置精度达到0.1度,满足医疗操作要求
- 多层安全冗余设计,包括硬件限位和扭矩监控
GR-1的成功应用证明了准直驱技术在高精度场景的可行性。
CubeMars AKE系列:商业化的关键推动
CubeMars的AKE系列执行器是准直驱技术商业化的重要里程碑。该系列产品提供了标准化的机械接口和控制协议,降低了机器人开发者的使用门槛。
关键参数:
- 扭矩密度:52 Nm/kg(AKE80-8)
- 背隙:9弧分
- 控制接口:CAN总线,支持位置、速度、电流多种模式
- 价格:约为同性能谐波方案的60%
这种商业化产品的出现,加速了准直驱技术在人形机器人领域的普及。
关键技术参数的工程意义
扭矩密度:平衡性能与尺寸
扭矩密度(Nm/kg)是评价关节执行器的核心指标。人形机器人的关节需要在有限空间内提供足够的驱动力,扭矩密度直接影响机器人的负载能力和运动性能。
目前准直驱关节的扭矩密度普遍在200-400 Nm/kg之间,典型值约为300 Nm/kg。这一水平虽然低于传统谐波方案,但对于大多数人形机器人应用已经足够。
以70 kg级人形机器人为例,髋关节峰值扭矩需求约为150-200 Nm。采用2.5 kg的准直驱执行器(扭矩密度300 Nm/kg),可以提供足够的动力储备,同时保持合理的关节尺寸。
功率密度:动态性能的决定因素
功率密度(W/kg)反映了关节的动态响应能力。人形机器人需要频繁的加减速和方向变化,高功率密度是实现敏捷运动的关键。
准直驱关节的功率密度通常在200-300 W/kg,配合低传动比带来的低惯性,可以实现快速的动态响应。相比之下,传统高传动比方案虽然扭矩大,但电机转速低,功率输出受限。
力控精度:交互质量的保障
力控精度决定了机器人与环境交互的质量。在装配、搬运等操作中,需要精确控制接触力,避免损坏物品或机器人本身。
准直驱关节通过电流环实现的力控精度通常在额定扭矩的1-2%。对于100 Nm的关节,力控分辨率约为1-2 Nm,满足大多数操作任务的需求。
背隙与传动刚度
背隙是齿轮传动固有的问题,会导致低速运动时的非线性和位置滞后。准直驱关节通常采用高精度行星减速器,背隙控制在10弧分以内。
传动刚度影响关节的频率响应和振动抑制能力。行星减速器的扭转刚度通常高于谐波减速器,有利于高动态响应的实现。
工程实现的技术挑战
电机设计:高扭矩密度的追求
准直驱方案要求电机提供更高的输出扭矩,这对电磁设计提出了严苛要求。传统的有框电机受限于结构尺寸,难以达到所需的扭矩密度。
目前主流方案采用无框力矩电机,通过增大气隙直径和优化磁路设计,实现扭矩密度的提升。但这也带来了新的问题:
- 较大的转子惯量,影响动态响应
- 更高的铜损和铁损,热管理压力增大
- 制造精度要求高,装配难度大
部分厂商开始尝试Halbach阵列等新型磁路结构,进一步提升扭矩密度。
热管理:持续功率的瓶颈
关节执行器的散热能力直接限制了其持续输出功率。无框电机的定子通常与减速器壳体集成,散热路径受限。
典型的热管理策略包括:
- 优化铜线绕组,降低铜损
- 采用高导热材料,加速热传导
- 在壳体设计散热翅片或水冷通道
- 通过算法优化工作循环,避免持续过载
在实际应用中,准直驱关节的持续输出功率通常为峰值功率的30-40%。如何进一步提升散热能力,是当前研发的重点方向。
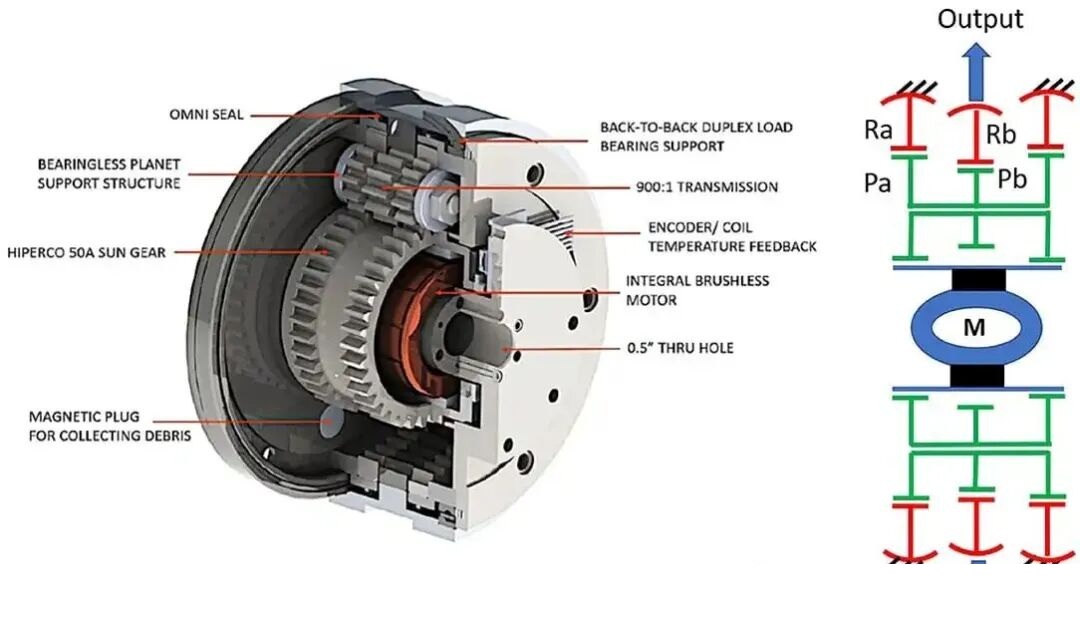
减速器选型:精度与寿命的平衡
低传动比行星减速器的设计需要在精度、刚度、寿命之间做出权衡。传动比越低,单级齿轮的齿数越少,对加工精度的要求越高。
目前主流方案采用两级或三级行星结构,总传动比6:1到10:1。关键技术点包括:
- 高精度齿轮加工,齿面粗糙度Ra≤0.4μm
- 优化齿面修形,降低啮合冲击
- 选用高强度材料,提升接触疲劳寿命
- 预紧设计,减小背隙
部分高端产品开始采用谐波齿轮+行星齿轮的复合结构,兼顾低传动比和高精度的需求。
控制算法:参数辨识与补偿
基于电流的力控制需要精确的电机扭矩常数和动力学参数。但这些参数会随着温度、磨损等因素变化,影响控制精度。
先进的控制策略包括:
- 在线参数辨识,实时更新模型参数
- 摩擦力补偿,抵消齿轮箱的非线性
- 扰动观测器,估计外部负载力矩
- 自适应控制,应对参数变化
这些算法的实现需要高性能的嵌入式处理器和精密的传感器数据,对控制系统的计算能力提出了更高要求。
产业发展趋势与展望
市场规模预测
根据行业分析,全球人形机器人市场规模预计在2030年达到300亿美元,年复合增长率超过50%。作为核心部件,准直驱关节的市场份额预计将占到20%左右,约60亿美元。
这一增长主要由以下因素驱动:
- 制造业劳动力短缺,推动机器人替代需求
- 技术成熟度提升,人形机器人进入实用阶段
- 成本持续下降,商业化应用的经济性改善
技术发展方向
未来3-5年,准直驱关节技术的发展重点包括:
扭矩密度提升:通过新型磁路设计和高性能材料,将扭矩密度提升至80-100 Nm/kg,进一步缩小与传统方案的差距。
成本控制:通过标准化设计和规模化生产,预计单关节成本可下降30-40%,加速产业化进程。
智能化升级:集成边缘计算能力,实现关节级的智能感知和决策,提升系统的自主性。
模块化与标准化:建立统一的机械接口和通信协议,提升不同厂商产品的互操作性。
产业链布局
准直驱关节的产业链正在快速完善:
- 上游:永磁材料、高性能轴承、精密齿轮等关键零部件
- 中游:关节执行器集成商,如CubeMars、智元、宇树等
- 下游:人形机器人整机厂商,包括特斯拉、优必选、傅利叶等
国内企业在中下游环节已经形成较强的竞争力,但在高性能永磁材料、精密轴承等上游领域仍需加强技术积累。
结语
准直驱关节技术代表了人形机器人驱动系统设计的一种工程化思路。它并非简单地在直驱和减速驱动之间折中,而是基于对人形机器人运动特性的深刻理解,做出的系统性优化。
从技术角度看,准直驱的优势在于:
- 良好的力控透明度,无需额外力传感器
- 优秀的动态响应,控制带宽达kHz级别
- 合理的成本结构,有利于大规模产业化
- 相对简单的机械结构,提升系统可靠性
当然,该技术也面临挑战:
- 扭矩密度仍低于传统方案,需持续优化
- 热管理要求严格,影响持续输出能力
- 制造精度要求高,对供应链能力有较高要求
在我十多年的机械设计经验中,见证了太多"完美方案"在工程化过程中遭遇困难。准直驱技术能够在短时间内获得如此广泛的应用,根本原因在于它抓住了人形机器人应用的核心需求,在性能、成本、可靠性之间找到了最佳平衡点。
随着技术的持续进步和产业链的逐步完善,准直驱关节有望在未来3-5年内成为人形机器人领域的主流技术方案。对于从事机器人开发的工程师而言,深入理解这项技术的原理和工程实现细节,将是把握行业发展机遇的关键。
参考资料
- MDPI - Design of Actuators for Humanoid Robots
- CubeMars Technical Documentation - AKE Series
- ALVA Industries - Direct Drive vs. Geared Actuators
- Frontiers in Robotics - Control and Evaluation of Humanoid Robot Systems
中文:本文作者Zane Zhang,我方已获正式授权转载;任何第三方转载须另行取得原作者书面许可。
English:Article by Zane Zhang; we have obtained formal authorization to repost. Any further republication must secure separate written permission from the original author.
- 上一篇:英伟达CPO交换机液冷系统-分集液管路均流仿真 2026/1/27
- 下一篇:人形机器人关节对电机的核心要求 2026/1/27