
精密减速器工业应用案例
引言:规格书与实际性能的差距
减速器选型时,工程师通常依赖厂商提供的规格书:额定扭矩、背隙、效率、寿命等参数。然而,规格书上的数字往往是在理想工况下的实验室测试结果,实际应用中的表现可能大相径庭。
停机维修、精度漂移、非预期故障,这些才是影响总拥有成本的关键因素。本文基于三个真实工业应用案例,累计45,500小时实测数据,分析不同类型减速器在实际工况下的表现,以及如何根据应用需求进行合理选型。
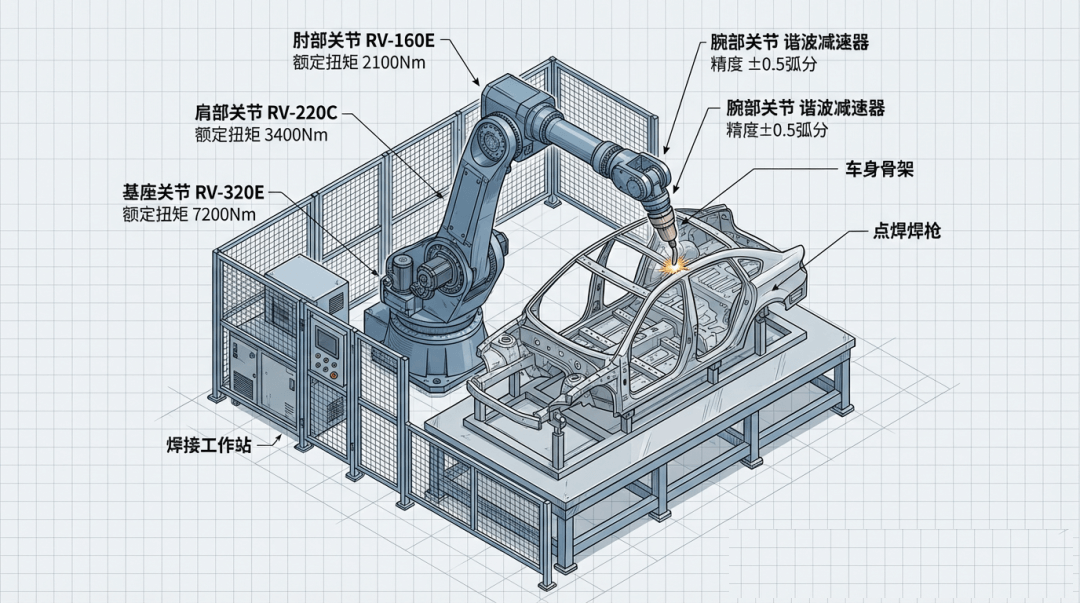
案例1:汽车车身焊接机器人(RV-320E,15,000小时)
系统配置与应用工况
机器人配置:
- 型号:六轴垂直多关节机器人
- 臂展:2.1米
- 负载能力:220kg
- 工作范围:基座360°,肩部-45°至+90°,肘部-180°至+80°
减速器配置:
- 基座关节:RV-320E(额定扭矩7,200Nm)
- 肩部关节:RV-220C(额定扭矩3,400Nm)
- 肘部关节:RV-160E(额定扭矩2,100Nm)
- 腕部关节:谐波减速器CSF-17(额定扭矩245Nm)
工况特点:
- 点焊循环:定位→焊接(0.8秒)→移动,循环时间约6秒
- 日运行时间:20小时/天,双班制
- 年运行天数:约300天
- 累计运行时间:15,000小时(30个月)
性能表现与精度漂移
背隙变化数据:
初始测量(安装后24小时):
- 基座RV-320E:0.8弧分
- 肩部RV-220C:0.9弧分
- 肘部RV-160E:0.7弧分
中期测量(8,000小时):
- 基座:1.0弧分
- 肩部:1.1弧分
- 肘部:0.9弧分
末期测量(15,000小时):
- 基座:1.2弧分
- 肩部:1.3弧分
- 肘部:1.0弧分
关键发现:
- 可预测的线性磨损:背隙增长曲线近似线性,15,000小时内增长约0.3-0.4弧分
- 负载相关性:基座和肩部(承受更大负载)的磨损速度略快于肘部
- 仍在规格范围内:所有关节背隙均未超过2.0弧分的设计极限
TCP(工具中心点)定位精度:
- 初始:±0.10mm
- 8,000小时:±0.12mm
- 15,000小时:±0.15mm
对于汽车点焊应用,±0.15mm的定位精度完全满足焊接质量要求(焊点直径通常8-12mm)。
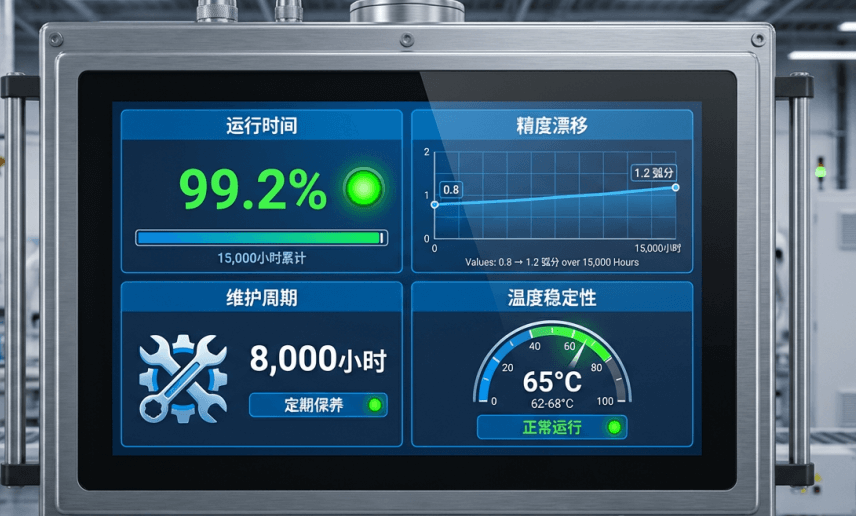
运行可靠性与维护记录
运行时间统计:
- 计划运行时间:15,120小时(30个月×21天/月×24小时)
- 实际运行时间:15,000小时
- 运行时间占比:99.2%
停机原因分析:
- 计划维护:80小时(润滑、检查)
- 非减速器故障:40小时(控制器、传感器等)
- 减速器相关停机:0小时
维护记录:
- 润滑周期:每8,000小时更换一次合成润滑脂
- 首次润滑:8,000小时,耗时约4小时
- 第二次润滑:16,000小时(尚未到期)
润滑检查发现:润滑脂未见明显变色或污染,摆线轮齿面磨损均匀,无异常磨粒。
温度特性与能耗
温度监测数据:
- 环境温度:18-28°C
- 稳态运行温度:60-68°C(基座RV-320E)
- 启动至稳态时间:约40-50分钟
温升分析:
- 温升:+38-42°C
- 温升来源:摩擦损耗(70-75%)+ 负载损耗(25-30%)
温度控制在70°C以下,对润滑脂和密封件寿命有利。
案例2:电子装配SCARA机器人(谐波CSF-17,18,500小时)
系统配置与应用工况
机器人配置:
- 型号:四轴SCARA(选择顺应性装配机器人臂)
- 工作半径:600mm
- 负载能力:5kg
- 重复定位精度:±0.01mm(规格书)
减速器配置:
- J1和J2关节:谐波减速器CSF-17(减速比100:1)
- 额定扭矩:245Nm
- 背隙规格:≤30角秒(0.5弧分)
工况特点:
- 电子元件拾取与放置:电阻、电容、IC芯片
- 器件间距:0.4-1.2mm
- 循环时间:约2.5秒/件
- 日运行时间:22小时/天
- 年运行天数:340天(高稼动率)
- 累计运行时间:18,500小时(28个月)
精度表现与质量数据
背隙精度变化:
初始测量:
- J1关节:0.5弧分(30角秒)
- J2关节:0.6弧分(36角秒)
中期测量(10,000小时):
- J1关节:0.6弧分
- J2关节:0.7弧分
末期测量(18,500小时):
- J1关节:0.8弧分
- J2关节:0.9弧分
重复定位精度实测:
- 测试方法:激光干涉仪,1,000次往复运动
- 初始:±0.008mm(优于规格书±0.01mm)
- 10,000小时:±0.009mm
- 18,500小时:±0.012mm(略超规格,但仍满足应用需求)
装配质量验证:
- 首通率(First Pass Yield):99.94%
- 缺陷率:600 PPM(百万分之六百)
- 主要缺陷类型:器件偏移、遗漏,非减速器直接相关
对于0.4mm器件间距的应用,±0.012mm的重复定位精度是可接受的(约3%的器件间距)。
维护历史与可靠性
维护记录:
- 累计运行时间:18,500小时
- 减速器部件更换:0次
- 润滑补充:0次(谐波减速器通常免维护至20,000小时)
- 减速器相关停机:0小时
可靠性指标:
- MTBF(平均无故障时间):>18,500小时(尚未发生故障)
- 运行时间占比:99.7%(停机主要来自换型和计划维护)
谐波减速器在这种高精度、中等负载、高频率往复运动的应用中表现优异。
成本效益分析
初始投资:
- 单台谐波CSF-17:约¥2,400
- 两个关节总成本:¥4,800
18,500小时运行成本:
- 能源消耗:约¥1,200(0.08kWh × ¥0.8/kWh × 18,500小时)
- 维护成本:¥0(免维护)
- 停机损失:约¥1,500(按¥500/小时停机成本计算)
**总拥有成本(18,500小时):**约¥7,500
单件成本摊销:
- 产量:约2,400万件(18,500小时 × 3,600秒/小时 ÷ 2.5秒/件)
- 减速器成本摊销:约¥0.0003/件
对于高产量应用,谐波减速器的高初始成本被巨大的产量所摊销。
案例3:物流AGV(行星减速器PLE090,12,000小时)
系统配置与应用工况
AGV配置:
- 类型:潜伏式AGV(Latent AGV)
- 载重能力:1,500kg
- 驱动方式:双轮差速驱动
- 导航方式:激光SLAM+二维码
减速器配置:
- 驱动轮减速器:行星减速器PLE090(减速比5:1)
- 额定扭矩:90Nm
- 背隙规格:≤8弧分
工况特点:
- 路径精度要求:±10mm(相对于规划路径)
- 平均速度:1.2m/s
- 日运行距离:约15-20km
- 运行模式:启停频繁(平均50-80次/小时)
- 累计运行时间:12,000小时(18个月)
性能表现与磨损特性
背隙变化数据:
初始测量:
- 左驱动轮:4.2弧分
- 右驱动轮:4.0弧分
中期测量(6,000小时):
- 左驱动轮:5.5弧分
- 右驱动轮:5.2弧分
末期测量(12,000小时):
- 左驱动轮:6.8弧分
- 右驱动轮:6.5弧分
关键发现:
- 磨损速度较快:相比RV和谐波,行星减速器背隙增长更快(12,000小时增长2.5弧分)
- 仍在可用范围:背隙≤8弧分的规格尚未突破
- 路径精度满足要求:±10mm的路径精度要求不高,磨损未影响使用
路径精度实测:
- 初始:±4mm
- 6,000小时:±6mm
- 12,000小时:±8mm
对于物流应用,±8mm的路径精度完全可接受(托盘尺寸通常1,200×1,000mm,定位公差±50mm)。
维护成本与经济性
维护记录:
- 润滑周期:每2,000小时换油
- 总换油次数:6次
- 每次换油耗时:约1.5小时
- 累计维护停机:9小时
密封件更换:
- 8,000小时更换输出轴密封圈
- 耗时:约2小时
- 部件成本:约¥150
总维护成本(12,000小时):
- 润滑油:6次 × ¥80 = ¥480
- 密封件:¥150
- 人工(按¥300/小时):11小时 × ¥300 = ¥3,300
- 停机损失(按¥200/小时):11小时 × ¥200 = ¥2,200
- 总计:¥6,130
与RV减速器的成本对比(假设RV方案):
- RV-80N采购成本:约¥1,600(相比行星PLE090的¥890,贵¥710)
- RV维护周期:8,000小时(更少维护)
- 12,000小时维护成本:约¥2,400
经济性结论:
对于这种低精度要求、高维护便利性的应用,行星减速器仍是更经济的选择,尽管维护频率更高,但初始投资的节省(¥710/台)和维护成本的增加(¥3,730)相比,总体仍节省约¥1,020(单台,12,000小时)。
如果车队规模为50台AGV,节省约¥51,000。
效率与能耗
实测效率:
- 空载效率:96%(规格书:≥95%)
- 额定负载效率:94%(规格书:≥94%)
能耗对比(vs RV减速器):
- 行星减速器:约¥11,200(12,000小时,按驱动电机2kW × 效率损耗6%)
- RV减速器:约¥10,080(效率97%)
- 能耗差异:约¥1,120/台(12,000小时)
综合考虑采购、维护和能耗,行星减速器在这种应用中仍具备经济性。
对比分析与选型指南
三大案例对比矩阵
| 指标 | 汽车焊接(RV) | 电子装配(谐波) | 物流AGV(行星) |
|---|---|---|---|
| 累计运行时间 | 15,000小时 | 18,500小时 | 12,000小时 |
| 初始背隙 | 0.8弧分 | 0.5弧分 | 4.2弧分 |
| 末期背隙 | 1.2弧分 | 0.8弧分 | 6.8弧分 |
| 背隙增长 | +0.4弧分 | +0.3弧分 | +2.6弧分 |
| 维护次数 | 1次润滑 | 0次 | 6次换油+1次密封 |
| 减速器故障 | 0次 | 0次 | 0次 |
| 运行时间占比 | 99.2% | 99.7% | 98.8% |
| 12,000小时TCO | ~¥28,000 | ~¥7,500 | ~¥7,020 |
四步选型决策框架
步骤1:明确精度要求
- 高精度(<1弧分):谐波或RV
- 中精度(1-3弧分):RV或高精度行星
- 低精度(>3弧分):行星
步骤2:评估负载特性
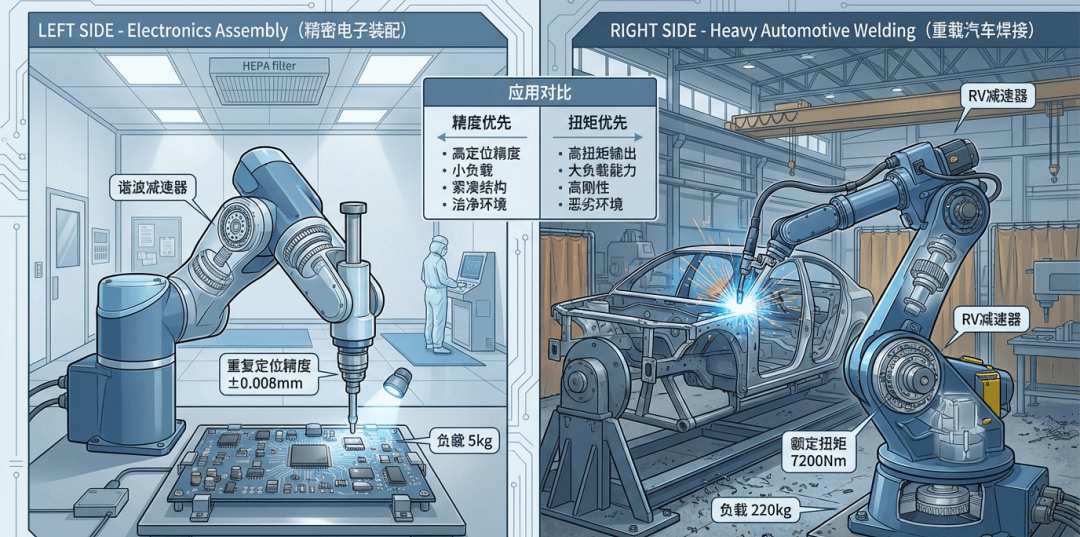
- 重载、冲击载荷:RV(刚性高、承载能力强)
- 中载、平稳运动:谐波(效率高、精度高)
- 轻载、启停频繁:行星(经济性好)
步骤3:分析维护便利性
- 难以维护(海上平台、高空):谐波(免维护)
- 便于维护(地面工厂):行星可接受
- 长寿命要求:RV或谐波
步骤4:计算生命周期成本
- 不仅看采购价格
- 综合考虑:能耗、维护、停机损失
- 计算盈亏平衡点(见第四篇文章)
行业应用推荐
汽车制造
推荐方案:RV减速器
理由:
- 焊接、搬运、装配需要高刚性
- 车身焊接冲击载荷大
- 15,000-25,000小时寿命匹配生产线改造周期
- 案例验证:99.2%运行时间,零故障
典型配置:
- 基座/肩部/肘部:RV-220C至RV-320E
- 腕部:谐波CSF-14至CSF-20
电子制造
推荐方案:谐波减速器
理由:
- 高精度定位(±0.01mm级别)
- 免维护(洁净室环境维护困难)
- 高频率往复运动(>1Hz)
- 案例验证:18,500小时免维护,99.7%运行时间
典型配置:
- SCARA J1/J2:CSF-17至CSF-32
- Delta并联机器人:CSG-14至CSG-20
物流仓储
推荐方案:行星减速器
理由:
- 路径精度要求低(±10mm)
- 成本敏感(大规模部署)
- 维护便利(地面设备)
- 案例验证:12,000小时,相比RV节省¥1,020/台
典型配置:
- AGV驱动轮:PLE060至PLE120
- 提升机构:可考虑RV(高负载、低速)
总结
基于45,500小时累计实测数据,关键结论:
- 规格书不是全部:实际性能受工况、维护、装配质量影响,需要长期监测验证
- 精度会缓慢衰减:RV和谐波的背隙增长较慢(0.3-0.4弧分/15,000小时),行星较快(2.6弧分/12,000小时)
- 可靠性普遍良好:三大案例无一发生减速器故障,说明主流品牌质量稳定
- 选型需匹配应用:不存在"最好"的减速器,只有"最合适"的方案
- TCO思维:采购成本只是冰山一角,维护、能耗、停机损失才是大头
声明
本文作者Zane Zhang,我方已获正式授权转载;任何第三方转载须另行取得原作者书面许可。
Article by Zane Zhang; we have obtained formal authorization to repost. Any further republication must secure separate written permission from the original author.
- 上一篇:星型人字齿轮瞬态温度场仿真 2026/1/22
- 下一篇:精密减速器TCO分析:为什么谐波比行星更经济 2026/1/19