
压电陶瓷传感器在人形机器人领域有哪些应用?
引言
人形机器人正经历从实验室走向产业化的关键阶段,传感器技术作为机器人感知与交互的核心,直接影响着系统的性能表现。在众多传感技术路线中,压电陶瓷传感器凭借其独特的物理特性引起了业界关注。本文从工程实践角度出发,分析压电陶瓷传感器在人形机器人领域的技术可行性、应用场景以及面临的工程挑战。
压电陶瓷传感器的核心技术特征
工作原理与结构特点
压电陶瓷传感器基于压电效应工作——当材料受到机械应力时,内部电荷分布发生变化,产生电势差。这种机电耦合特性使其能够将力学信号直接转换为电信号。

典型的压电陶瓷传感器采用"螺栓夹紧金属-陶瓷三明治结构",这种设计无需传统的传动机构,通过压电材料的直接变形实现能量转换。相比电容式或电阻式传感器,这种无接触测量方式减少了机械磨损,提高了系统可靠性。
关键性能指标
根据最新研究数据,先进的压电陶瓷传感器具备以下性能特征:
- 超高分辨率: 可达15纳米级,远超传统传感器
- 极速响应: 响应时间约0.5毫秒,满足实时控制需求
- 低滞后性: 滞后率低于3.95%,确保测量精度
- 宽温度范围: 工作温度范围-40°C至+125°C
- 优异的线性度: 非线性度小于0.1% FS
这些性能参数使压电陶瓷传感器在需要高精度、快速响应的场景中展现出明显优势。
在机器人关节中的应用可能性
直驱式关节集成方案
压电陶瓷传感器在机器人关节中的应用主要有两个方向:作为驱动元件和作为测量元件。
作为驱动元件时,通过摩擦耦合机制实现微位移放大。压电陶瓷片产生微米级变形,通过特殊的机械结构将其放大为毫米级甚至厘米级的宏观运动。这种方案的核心挑战在于:
- 摩擦力精密控制: 接触界面的摩擦系数需要严格控制,温度变化、磨损都会影响输出性能
- 高精度装配要求: 预压力需控制在±5%范围内,否则会影响效率和寿命
- 复杂的控制算法: 需要补偿非线性、迟滞等因素,控制器开发难度较大
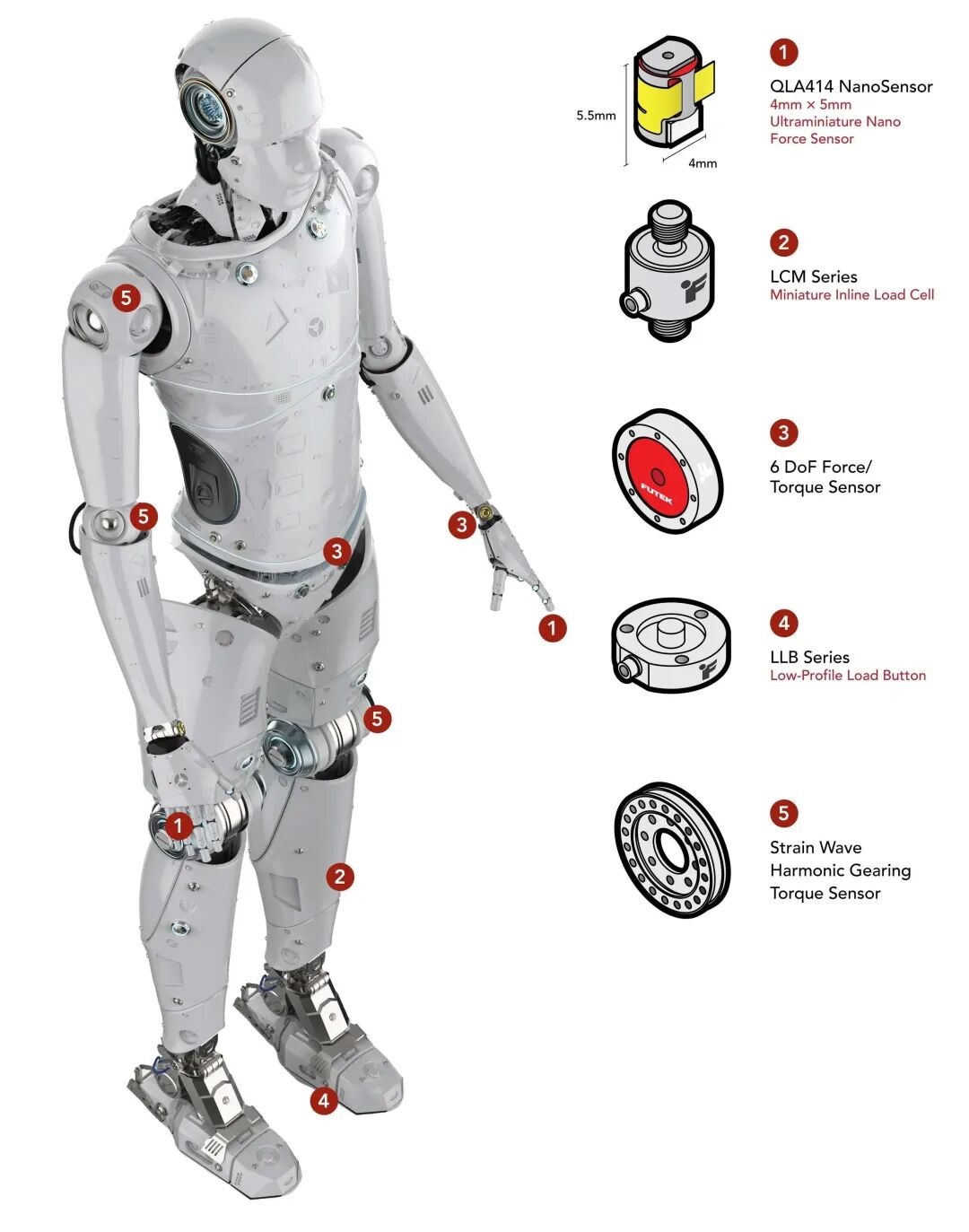
关节力矩与位置感知
相比直接驱动,压电陶瓷传感器更适合作为力矩传感器集成在关节中。其优势体现在:
- 三维力检测能力: 可同时测量x、y、z三个方向的力分量
- 动态响应优势: 响应速度是应变片式传感器的5-10倍
- 抗电磁干扰: 在电机密集的关节环境中表现稳定
然而,工程实现需要考虑:
- 信号调理电路复杂: 压电传感器输出阻抗高,需要专用的电荷放大器
- 低频特性限制: 对静态力测量能力较弱,需要配合其他传感器使用
- 成本与体积平衡: 多轴力传感器的集成会增加关节复杂度
多样化应用场景探索
触觉感知系统
在人形机器人的手指、手掌等接触部位,压电陶瓷传感器可构建高灵敏度触觉阵列:
- 压力分布映射: 通过阵列化布置,实时获取接触压力的空间分布
- 动态触觉反馈: 识别物体表面纹理、硬度等特征
- 抓取力控制: 实现柔顺抓取,避免损坏易碎物体
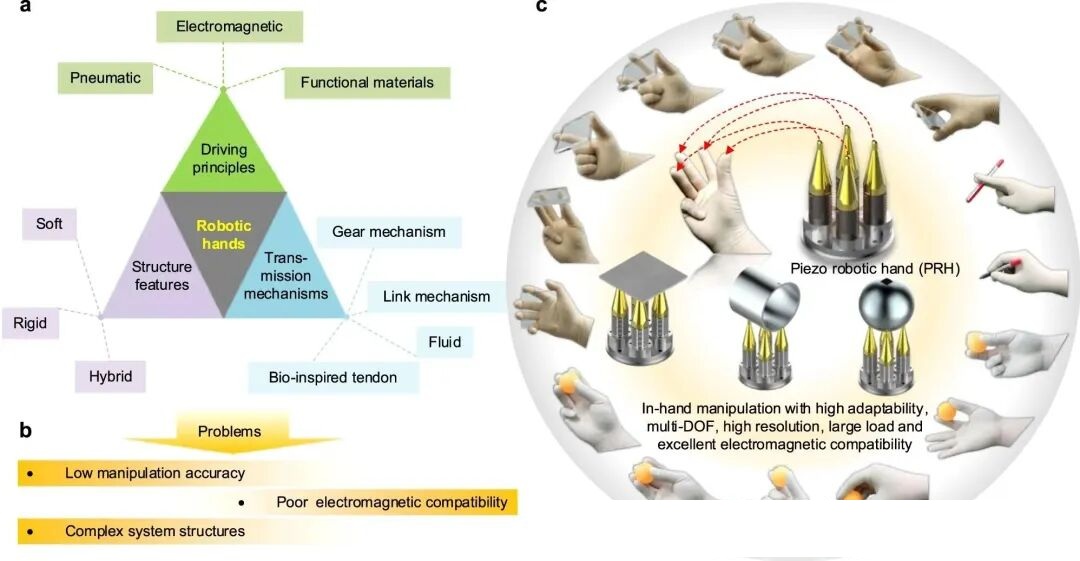
Nature期刊报道的压电机器人手研究显示,这种技术可实现从微米到毫米级的精密操作,展现出跨尺度运动操控能力。
医疗机器人应用
在手术机器人和康复机器人领域,压电陶瓷传感器展现出独特价值:
- 组织刚度检测: 采用45度角配置的传感器阵列,对不同组织类型的识别准确率达92%
- 手术力反馈: 为主刀医生提供触觉反馈,提高手术精度
- 康复训练监测: 实时监测患者的运动力度和轨迹
结构健康监测
在机器人本体结构中嵌入压电传感器,可实现状态监测:
- 应变实时监测: 检测关键构件的应力状态,预防疲劳破坏
- 振动分析: 识别异常振动模式,实现故障预警
- 成本效益优势: 相比传统应变片,可减少50%以上的布线成本

技术对比与选型考量
与其他传感技术的对比
| 性能指标 | 压电陶瓷 | 电容式 | 电阻式(应变片) | 光学式 |
|---|---|---|---|---|
| 动态响应 | 优秀(0.5ms) | 良好(2-5ms) | 中等(10-50ms) | 优秀(1ms) |
| 静态测量 | 较弱 | 优秀 | 优秀 | 优秀 |
| 温度稳定性 | 好(-40~125°C) | 中等 | 较差 | 优秀 |
| 功耗 | 极低 | 低 | 中等 | 高 |
| 成本 | 中等 | 低 | 低 | 高 |
| 小型化程度 | 优秀 | 优秀 | 良好 | 受限 |
工程选型建议
基于上述对比,压电陶瓷传感器更适合以下场景:
- 高频动态测量: 振动监测、冲击力检测等
- 空间受限场合: 需要小型化、轻量化设计
- 恶劣电磁环境: 电机、驱动器密集区域
- 能量受限系统: 对功耗敏感的便携式机器人
不适合的场景:
- 纯静态力测量: 如持续负载监测
- 超低成本需求: 对成本极度敏感的应用
- 超大量程测量: 需要测量数百千克力的场合
产业化进展与技术趋势
材料技术演进
压电材料正在经历代际升级:
- 第一代PZT陶瓷: 传统铅基材料,性能成熟但环保压力大
- 无铅压电陶瓷: BaTiO₃、KNN基材料,环保但性能略有折衷
- 4.5代离电势材料: 弹簧式微结构自发形成技术,综合性能提升30%以上
集成技术突破
- 柔性压电薄膜: 厚度小于100微米,可贴合在曲面关节表面
- 自供电传感器: 利用压电效应本身发电,实现能量自给
- 智能传感节点: 集成信号处理、无线通信功能,减少布线复杂度
商业化案例
当前已有多个成熟应用案例:
- 工业机器人: PI Ceramic等厂商提供标准化关节力矩传感器解决方案
- 服务机器人: 用于触觉反馈和人机交互
- 外骨骼系统: 实现步态检测和力量辅助控制
技术挑战与工程瓶颈
信号处理难题
压电传感器的电荷信号微弱且阻抗极高,对信号链路要求苛刻:
- 电荷泄漏: 长期测量时电荷会通过绝缘层泄漏,影响低频响应
- 寄生电容: 连接电缆会引入寄生电容,降低灵敏度
- 温度漂移: 压电系数和介电常数的温度依赖性需要补偿
成本与规模化生产
- 制造工艺复杂: 压电陶瓷需要高温烧结、极化处理等工艺
- 良品率挑战: 材料性能一致性控制难度大
- 定制化需求: 不同应用需要定制尺寸和性能,难以标准化
系统集成问题
- 机械安装精度: 预紧力、安装角度对性能影响显著
- 多传感器融合: 需要与其他类型传感器互补使用
- EMC设计: 在强电磁环境中保持信号完整性
未来发展展望
技术融合趋势
压电传感器正与其他技术融合创新:
- 压电-摩擦电复合: 结合两种效应,拓宽频率响应范围
- 压电-AI结合: 利用机器学习补偿非线性,提升测量精度
- 多物理场耦合: 同时检测力、温度、振动等多参数
应用领域拓展
除了传统机器人关节,新兴应用包括:
- 柔性机器人: 用于软体机器人的形变感知
- 仿生假肢: 提供接近自然的触觉反馈
- 人机协作: 实现更安全、更自然的交互
标准化与生态建设
随着技术成熟,行业标准化工作逐步推进:
- 性能测试标准: 统一测试方法和评价指标
- 接口协议标准: 促进不同厂商产品互联互通
- 安全认证体系: 保障在医疗、服务等领域的应用安全
结论
压电陶瓷传感器凭借高灵敏度、快速响应、低功耗等优势,在人形机器人的动态力测量、触觉感知、振动监测等场景中具有明显的技术优势。然而,其在静态力测量、成本控制、系统集成等方面仍面临挑战。
从工程实践角度看,压电陶瓷传感器更适合作为机器人传感系统的补充,而非完全替代现有技术。未来随着材料技术、制造工艺、信号处理算法的进步,其应用场景将进一步拓展,在高端机器人市场占据一席之地。
对于工程团队而言,选用压电陶瓷传感器需要综合评估具体应用需求、性能指标、成本预算以及系统集成复杂度,避免盲目追求技术先进性而忽视工程可行性。只有在充分理解其技术特性和局限性的基础上,才能发挥其真正价值,推动人形机器人技术的实质性进步。
参考文献方向:
- Nature Communications: Piezo robotic hand for motion manipulation
- MDPI Micromachines: Recent Advances in Piezoelectric Materials Application
- Springer: Review on piezoelectric actuators
- 各压电陶瓷传感器厂商技术白皮书(PI Ceramic, Futek等)
数据来源说明: 本文技术数据源自公开发表的学术文献、行业报告以及主流传感器厂商的产品规格书,相关性能参数仅供参考,实际应用需以具体产品测试数据为准。
中文:本文作者Zane Zhang,我方已获正式授权转载;任何第三方转载须另行取得原作者书面许可。
English:Article by Zane Zhang; we have obtained formal authorization to repost. Any further republication must secure separate written permission from the original author.
- 上一篇:人形机器人关节对电机的核心要求 2026/1/27
- 下一篇: 分形搅拌桨的市场规模有多大? 2026/1/26